Mikrokomputer 8048 ma 27 linii wejcia-wyjcia, zgrupowanych w trzy 8-bitowe porty: BUS, P1, P2, i trzy indywidualne linie wejciowe: T0, T1, / INT. W zasadzie tylko port P1 i bity od 4 do 7 portu P2 sš przeznaczone do pracy jako układy bezporedniego wejcia -wyjcia. Pozostałe linie, w zależnoci od konstrukcji systemu oraz oprogramowania, mogš spełniać inne funkcje. Tylko w systemie jednoukładowym, tzn. bez dodatkowych zewnętrznych układów pamięci, pamięci danych czy wejcia-wyjcia, wszystkie trzy porty mogš być wykorzystane jako linie bezporedniego wejcia-wyjcia.
Porty P1, P2
Porty P1, P2
Pseudodwukierunkowe (ang.
quasibidirectional) porty P1 i P2 sš pod względem elektrycznym
takie same. Mogš pracować jako wejcia lub wyjcia
bezporednio, przy czym jest możliwe mieszanie linii wejciowych
i wyjciowych w jednym porcie. Dane wyjciowe wysyłane do
portu sš zapisywane w rejestrze buforowym i nie zmieniajš się do
chwili ponownego zapisywania. Przy odczytywaniu portu jest
przesyłana wartoć logiczna z końcówek układu. Poziomy
wejciowe sš w pełni zgodne ze standardem TTL. Wyjcie może
być obcišżone przez jedno standardowe wejcie TTL.
Strukturę jednej linii portu P1 lub P2 pokazano na rysunku:
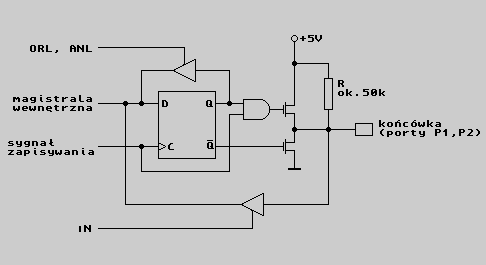
Każda linia jest dołšczona do napięcia + 5 V poprzez opornik
podcišgajšcy (ang. pullup) - R o opornoci ok. 50 kohm. Jeżeli
linia pracuje jako wyjciowa, to stan na końcówce układu zależy
od stanu przerzutnika D (buforowy rejestr wyjciowy). Wpisane
jedynki logicznej do przerzutnika spowoduje zatkanie tranzystorów
T1 i T2, a opornik R wymusi na wyjciu stan wysoki. Wpisane zera
do przerzutnika D spowoduje nasycenie tranzystora T2,
zawierajšcego linię do masy (ang. pulldown), a w konsekwencji
wymuszenie stanu niskiego na wyjciu. Tranzystor T1 jest otwierany
na chwilę (na czas około 1,5 cyklu maszynowego) i to zawsze w
momencie zapisywania jedynki do przerzutnika. Powoduje to
zbocznikowanie opornika R i dołšczenie linii portu do napięcia + 5
V poprzez opornoć ok. 5 kohm. Dzięki temu z kolei zmniejsza się
czas przełšczania 0 na 1 na wyjciu.
Jeżeli linia ma pracować jako wejcie, to do przerzutnika D musi być wpisana jedynka. Wtedy stan na końcówce układu może być wymuszony przez wyjcie bramki dołšczonej do tej końcówki.
Do przesyłania danych (słów 8-bitowych) między portami i akumulatorem służš rozkazy IN i OUT. W przypadku, gdy w jednym porcie częć linii jest wykorzystywana jako wejcia, a częć jako wyjcia, należy pamiętać, aby przy wysyłaniu słowa danych do portu na bitach wejciowych były jedynki. Zapisywanie spowoduje chwilowe zbocznikowanie opornika R i zmniejszenie opornoci wejciowej, co nie powinno być jednak szkodliwe dla wyjcia dołšczonej bramki.
Wykonanie rozkazu IN powoduje przesłanie do akumulatora wartoci logicznej z końcówek układu. Może się więc zdarzyć, że odczytany stan linii wyjciowej portu nie będzie zgodny ze stanem przerzutnika wyjciowego. Nastšpi to wtedy, kiedy do wyjcia dołšczy się układ zmieniajšcy poziom napięcia wyjciowego, np. bazę tranzystora. Operacja odczytania stanu wyjć przebiegnie poprawnie( tzn. będš odczytane ostatnio zapisane dane) tylko wtedy, kiedy do linii wyjciowych zostanš dołšczone układy nie zmieniajšce poziomu napięcia (np. wejcia TTL).
Możliwe jest sterowanie pojedynczymi bitami wyjciowymi portów, tzn. ustawianie bitu na 1 za pomocš rozkazu ANL - w obu przypadkach z odpowiedniš maskš. Rozkazy te powodujš odczytanie stanu portu z rejestru buforowego, wykonanie operacji i zapisanie wyniku do rejestru. Ponieważ odbywa się odczytywanie rejestru, to zawsze sš pobierane ostatnio zapisane dane, a z bitów wejciowych - jedynki. Przy ustawianiu maski (zwłaszcza przy rozkazie ANL) należy uważać, by do bitu wejciowego nie zostało wpisane zero. Również w tym przypadku, przy wpisaniu jedynki do przerzutnika nastšpi chwilowe zbocznikowanie opornika podcišgajšcego linię. Podczas zerowania mikrokomputera do rejestrów wyjciowych obu portów wpisujš się jedynki - a zatem porty sš ustawiane jako wejcia.
Mniej znaczšca połowa portu P2 (bity od 0 do 3) może też
być wykorzystana do dwóch innych funkcji (również
jednoczenie):
- jako wyjcie bardziej znaczšcych bitów adresu przy
odczytywaniu z zewnętrznej pamięci programu,
- jako 4-bitowa magistrala do komunikacji z ekspanderem 8243.
W obu przypadkach nie jest w zasadzie możliwe jednoczesne używanie tych bitów jako linii wejcia- wyjcia. Można natomiast korzystać z bitów od 4 do 7 portu P2, bez względu na to, co zostało zapisane w bitach od 0 do 3.
PORT BUS
PORT BUS
Jest to port w pełni dwukierunkowy (ang.
bidirectional), z wyjciami trójstanowymi. Może być wykorzystany
na trzy sposoby (do pracy w trybach), jako:
- bezporednie wejcie lub wyjcie,
- dwukierunkowy port ze strobowanymi operacjami zapisywania i odczytywania,
- dwukierunkowa multipleksowana magistrala adresowa i danych.
Sposób wykorzystania portu okrela konstruktor systemu. To on
decyduje, za pomocš jakich rozkazów będzie dokonywane
przesyłanie danych z i do portu. Po wyzerowaniu systemu linie portu
BUS sš ustawione w stan dużej impedacji.
Tryb pracy portu BUS jako bezporedniego wejcia lub
wyjcia jest przeznaczony dla systemów jednoukładowych, gdy
mikrokomputer nie korzysta z zewnętrznej pamięci programu lub
danych (nie może być więcej wykorzystany w układach 8035,
8039, 8040).Port BUS pracuje wtedy podobnie, jak porty P1 i P2 z
tym, że nie jest tu możliwe mieszanie linii wejciowych i
wyjciowych. Dane sš przesyłane do portu za pomocš rozkazów
OUTL, ORL lub ANL (rozkazy mogš być umieszczone wyłšcznie
w wewnętrznej pamięci programu) i zapisywane w rejestrze
wyjciowym. Po wykonaniu jednego z tych rozkazów linie portu sš
ustawione jako wyjcia. Odczytywanie portu (danych z końcówek
układu) dokonuje się w wyniku użycia rozkazu INS. Wykonanie
tego rozkazu nie zmienia stanu portu (stan dużej impedencji lub
wyjcie). Odczytanie portu pracujšcego jako wyjcie, czyli
wykonanie rozkazu INS po OUTL, daje skutki takie, jak w przypadku
portów P1 i P2. Podczas wykonania rozkazu zapisywania (OUTL) lub
odczytywania (INS) portu BUS, jest wysyłany na wyjcie sterujšce
impuls strobujšcy - odpowiednio /WR lub /RD. Impuls ten, zwykle
nie używany, może być wykorzystany jako sygnał gotowoci
danych lub potwierdzenia odczytania.
Tryb pracy portu BUS jako portu dwukierunkowego jest
przeznaczony przede wszystkim do współpracy mikrokomputera z
zewnętrznš pamięciš danych. W tym przypadku dane przesyłane
za pomocš rozkazów MOVX sš strobowane impulsami
sterujšcymi:
Przy zapisywaniu - /WR. przy odczytywaniu - /RD. Dane wyjciowe
z mikrokomputera sš podawane do portu BUS i powinny być
odczytane
przez urzšdzenie zewnętrzne w chwili narastania zbocza sygnału
/WR.
Dane wyjciowe z mikrokomputera sš podawane do portu BUS i
powinny być odczytane przez urzšdzenie zewnętrzne w chwili
narastania zbocza sygnału /WR. Dane wejciowe sš odczytywane z
portu BUS w chwili narastania zbocza sygnału /RD.
Każdorazowo po wykonaniu rozkazu MOVX port jest ustawiony w
stan dużej impedancji. W szczególnych przypadkach (jeli to
konieczne) jest możliwe używanie na przemian rozkazów OUTL i
INS oraz MOVX. Należy przy tym pamiętać, że wykonanie
rozkazów MOVX niszczy zawartoć rejestru wyjciowego portu.
W systemach z zewnętrznš pamięciš programu port BUS
spełnia funkcję dwukierunkowej, multipleksowanej magistrali
adresowej i danych do komunikacji zarówno z
pamięciš programu, jak i z zewnętrznš pamięciš danych (za
pomocš rozkazów MOVX). W tym przypadku nie wolno używać
rozkazów zapisywania do portu BUS (OUTL, ORL, ANL) - ich
wykonanie może spowodować zakłócenia w pracy systemu.
LINIE T0, T1, /INT
Trzy indywidualne linie T0, T1, /INT sš
wejciami sygnałów logicznych TTL, których stany stanowiš
warunki dla rozkazów skoków warunkowych. Wejcia te mogš być
testowane tylko za pomocš tych włanie rozkazów skoków.
Poszczególne linie mogš też spełniać inne funkcje:
- /INT jest wejciem przerywajšcym, miejscem dołšczenia
sygnału zgłoszenia przerwania zewnętrznego,
- T0 jest wejciem sygnału zegarowego o częstotliwoci fxtal/3
(fxtal- częstotliwoć rezonatora kwarcowego)po wykonaniu
rozkazu ENTO CLK;
- T1 jest po wykonaniu rozkazu STRC CNT wejciem impulsów
zliczanych w układzie czasowo-licznikowym.
Powrót
Przy zapisywaniu - /WR. przy odczytywaniu - /RD. Dane wyjciowe z mikrokomputera sš podawane do portu BUS i powinny być odczytane przez urzšdzenie zewnętrzne w chwili narastania zbocza sygnału /WR.
Dane wyjciowe z mikrokomputera sš podawane do portu BUS i powinny być odczytane przez urzšdzenie zewnętrzne w chwili narastania zbocza sygnału /WR. Dane wejciowe sš odczytywane z portu BUS w chwili narastania zbocza sygnału /RD. Każdorazowo po wykonaniu rozkazu MOVX port jest ustawiony w stan dużej impedancji. W szczególnych przypadkach (jeli to konieczne) jest możliwe używanie na przemian rozkazów OUTL i INS oraz MOVX. Należy przy tym pamiętać, że wykonanie rozkazów MOVX niszczy zawartoć rejestru wyjciowego portu.
LINIE T0, T1, /INT
- /INT jest wejciem przerywajšcym, miejscem dołšczenia sygnału zgłoszenia przerwania zewnętrznego,
- T0 jest wejciem sygnału zegarowego o częstotliwoci fxtal/3 (fxtal- częstotliwoć rezonatora kwarcowego)po wykonaniu rozkazu ENTO CLK;
- T1 jest po wykonaniu rozkazu STRC CNT wejciem impulsów zliczanych w układzie czasowo-licznikowym.